這是Tufts大學的 Center for Engineering Education and Outreach (CEEO)所製作的一系列LEGO SPIKE Prime 教學影片。
https://www.youtube.com/playlist?list=PL_zXBalpjbu33gw5CML3DtL7fN8640qku
從LEGO SPIKE Prime 套件介紹(#45678),SPIKE 軟體操作,硬體介紹:主機、馬達、距離感應器、顏色感應器、力量感應器。
很值得大家觀看學習!
這是Tufts大學的 Center for Engineering Education and Outreach (CEEO)所製作的一系列LEGO SPIKE Prime 教學影片。
https://www.youtube.com/playlist?list=PL_zXBalpjbu33gw5CML3DtL7fN8640qku
從LEGO SPIKE Prime 套件介紹(#45678),SPIKE 軟體操作,硬體介紹:主機、馬達、距離感應器、顏色感應器、力量感應器。
很值得大家觀看學習!




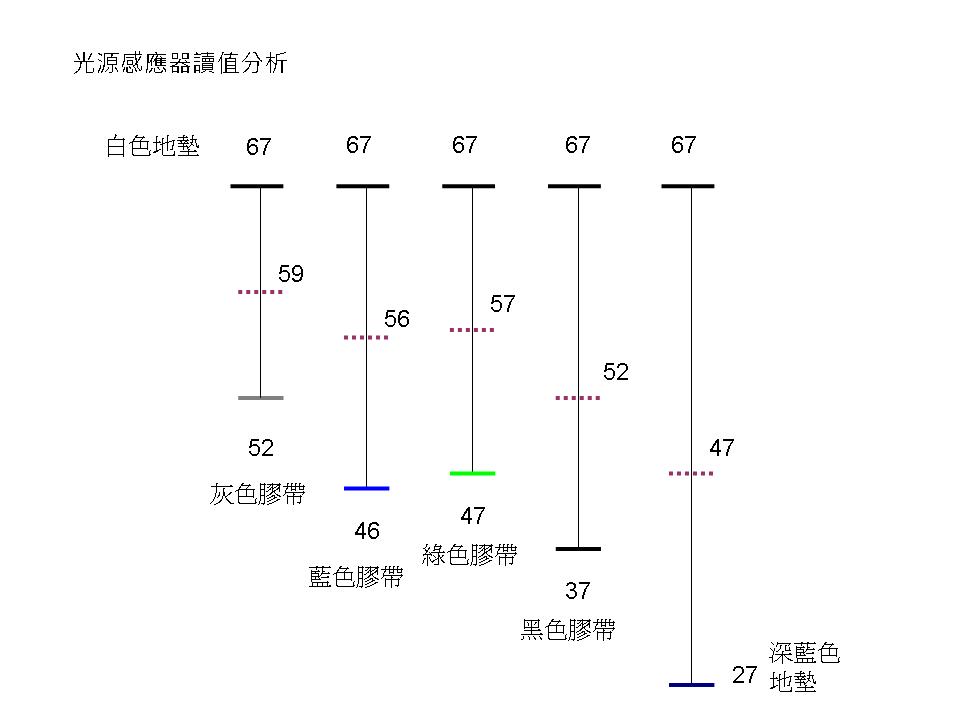
顏色
|
光源值
|
與白色計算的中間值
|
白色(地墊)
|
67
|
--
|
紅色
|
70
|
無太大差異 (68.5)
|
黃色
|
66
|
無太大差異 (66.5)
|
綠色
|
47
|
57
|
灰色
|
52
|
59
|
藍色
|
46
|
56
|
黑色
|
37
|
52
|
深藍色(地墊)
|
27
|
47
|